小型横走行式取出ロボット、50T ~ 350Tプラスチック射出成形機に広く応用されています。
小型横走行式取出ロボット、プラスチック成型機のランナーと成型品を速く取り出せます。
小型横走行式取出ロボット、工場自動化の要求を満たせます。
簡単に制御できる対話形ティーチングコントローラ。
制御システムは完全にCE、SPIとEUROMAPの国際安全規範に符合し、全世界射出機電子制御システムを全て通用できます。
リモコン画面式スクリーンはLCDディスプレイ、読みやすく字幕も120文字まで入力出来ます。
中国語/英語共存画面を採用し、任意に切り替れます。
16ビットCPUで、強い性能を持ち、編集機能は削除、挿入、代替機能が含まれてます。
プログラムにCOPY機能を提供できて、編集と改訂機能も組み合わせます。このシステムプログラムの編集と操作はとっても簡単です。プログラムの改訂も便利で迅速に出来る
100組のプログラムモジュール記憶、60組の標準なプログラム、40組のティートング可編集プログラムを組み合わせて、広くすべての金型要件に応用できます。
操作パネルと主体は分離形デザインを採用し、任意な場所で操作できて便利です。機械インターフェイス機能: 型締めインターロック、射出インターロック、エジェクタインターロック、安全扉連動制御,製品カウント,サイクル時間等が持っています。
特殊な外部待機システム機能は、超高タイプ金型と油圧中子機能付きな金型を対応できて、超高タイプ金型とロボットのぶつかることを避けられ、ロボットの最大機能を発揮できます。
中間プレート戻し確認裝置は、プレートの位置ズレ又はロボットとのぶつかることを防止できる安全なシステム。(オプション装備)
トラバースストロークは輸入された高性能周波数変換式ブレーキモーターで駆動し、各式の鋳型によって、速度とブレーキを調整できます
トラバースストロークはエンコーダー(ENCODER)を使用して、1~9点定位で放置できます。トラバースストロークは直接にパネル上に数値設定制御を操作することによって、任意的に定位できます。
世界で初めての製品アームとランナーアームを作って、手動モードの時に、操作誤差を避けるために、自動的にスピードを落せる、金型にベスト保護を提供します。(段取モード制御)
製品アームとランナーアームは自動モードの時に、特殊な快速取りと低速置きの安全設計があるので、従業員が作業エリアに誤進入の危険を避けられます。
外注商品
独自開発商品で自社販売可能です
バイヤーの商標に変更できます(ODM)
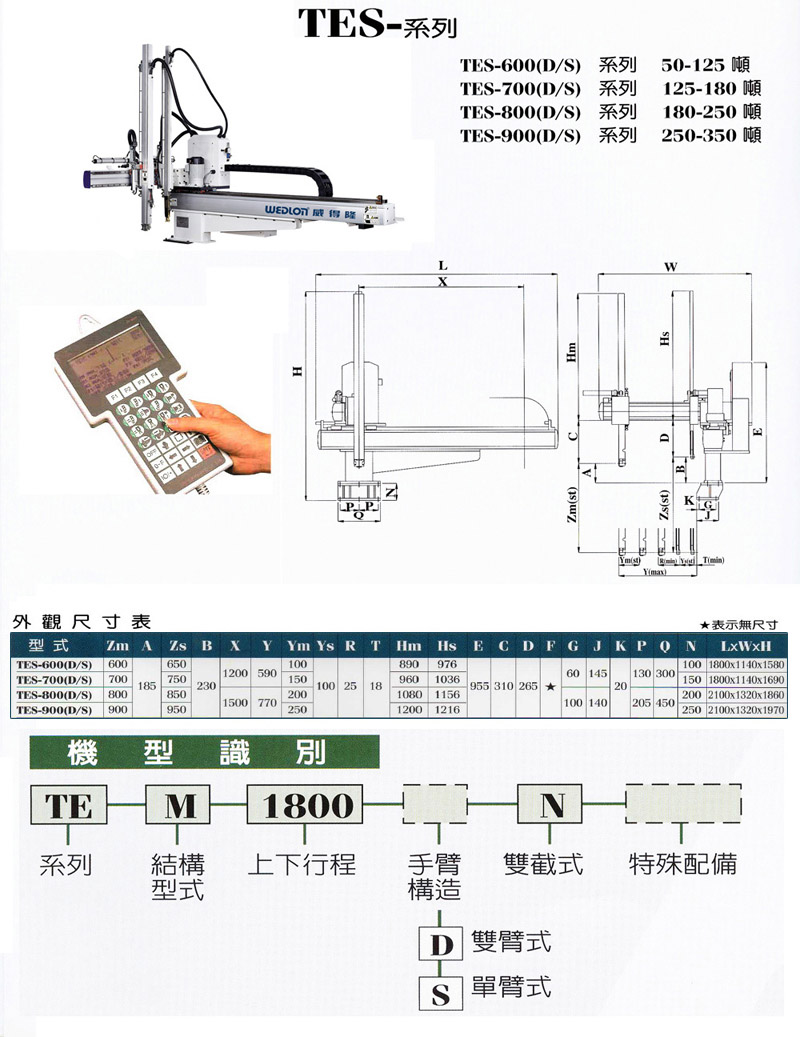
| 型番 | TES-600 (S/D) | TES-700 (S/D) | TES-800 (S/D) | TES-900 (S/D) |
| 適用フォーミングミルタイプ | 50 ~ 125 Tons | 125 ~ 180 Tons | 180 ~ 250 Tons | 250 ~ 350 Tons |
| 電源 | 1Ø 220V±10%,50/60Hz |
|||
| 消費でんりゅう | 3A |
|||
| 作動圧力 | 5kg/cm² |
|||
| 上下駆動方式(Z軸) | A: 気圧シリンダー / B: 気圧シリンダー |
|||
| 前後駆動方式(Y軸) | A: 気圧シリンダー / B: 気圧シリンダー |
|||
| 橫走行駆動方式(X軸) | 周波数変換モーター+エンコーダー或はサーボモーター |
|||
| 横向き駆動方式(A軸) | 気圧シリンダー |
|||
| 上下ストローク(Z軸)mm | A:600 / B:650 | A:700 / B:750 | A:800 / B:850 | A:900 / B:950 |
| 前後ストローク(Y軸)mm | A:150 / B:100 | A:150 / B:100 | A:250 / B:150 | A:250 / B:150 |
| 横走行ストローク(X軸)mm | 1208 | 1208 | 1508 | 1508 |
| 横向き角度(A軸) | 90º |
|||
| 最大挟む重量(治具の重さも含み) | 5kg |
|||
| 最大挟む重量(治具の重さも含み) | D: 27.7 / S: 15.9 | D: 31.9 / S: 18.1 | D: 36.9 / S:21.3 | D: 40.8 / S: 23.5 |
| 備考 | A: 完成品アーム/ B: ランナーアーム |
|||